详情
支持的可连接设备
| 制造商 | 产品名称 | 系列 | 机型 |
|---|---|---|---|
| Shibaura Machine Corporation | 机器人控制器 | - | TS5000 |
此外,与之相关的部分可选功能也不能使用,如需使用这些功能,请联系芝浦机械。
适用的人机界面
| 产品名称 | 分辨率 | 型号简称*1 | 软件 |
|---|---|---|---|
| GP4000系列 SP5000系列 SP5000X系列 ST6000系列 | 640 x 480像素(VGA) | GP-4501T(电阻式) | GP-Pro EX V4.00.000及以上版本 |
| 800 x 480像素(WVGA)*2 | 主机模块:SP-5B10 显示模块:SP-5400WA | ||
| GP4000系列 | 320 x 240像素(QVGA) | GP-4301T |
*1如本示例程序用于其他机型,需改变GP-Pro EX工程文件中的型号设置。了解详情,请参阅相关技术手册。
*2当分辨率为WVGA (800×480像素)时,功能按钮区域将位于屏幕右侧,请参阅手册 "Functions Added to Sample Project File for SP5000 Wide Model".
功能
- 可通过人机界面检查机器人控制器的状态。
- 批量监控机器人和TCmini通讯信号的状态(接口继电器状态)。可强制置位和复位。
- 获得并显示机器人的当前位置。
- 在人机界面上查看历史报警。
- 能使用人机界面的历史报警功能查看历史报警。
- “报警复位”、“程序复位”、“信号复位”指令可输出至控制器。
- 已制作的画面包括:维护功能、设备监控、I/O监控时序图、可连接外接控制器的数据传输。
* 使用此示例工程文件时,须安装相关驱动程序,请在我们官网上下载。
文件下载

GP-4501T / VGA(640*480)
3.50 MB (3,668,292 字节)
SP-5400WA / WVGA(800*480)
3.50 MB (3,672,530 字节)
GP-4301T / QVGA(320*240)
2.93 MB (3,070,294 字节)
更新历史
[Rev 04] (2024/04/02)
- 删除了 “It is necessary to incorporate a dedicated ladder logic program into the robot controller.”
[Rev 03] (2021/10/15)
- 修改了连接设置 新增支持的机器人控制器版本
[Rev 02] (2021/04/20)
- 改变了通讯设置的说明
[Rev 01] (2021/03/26)
- 新
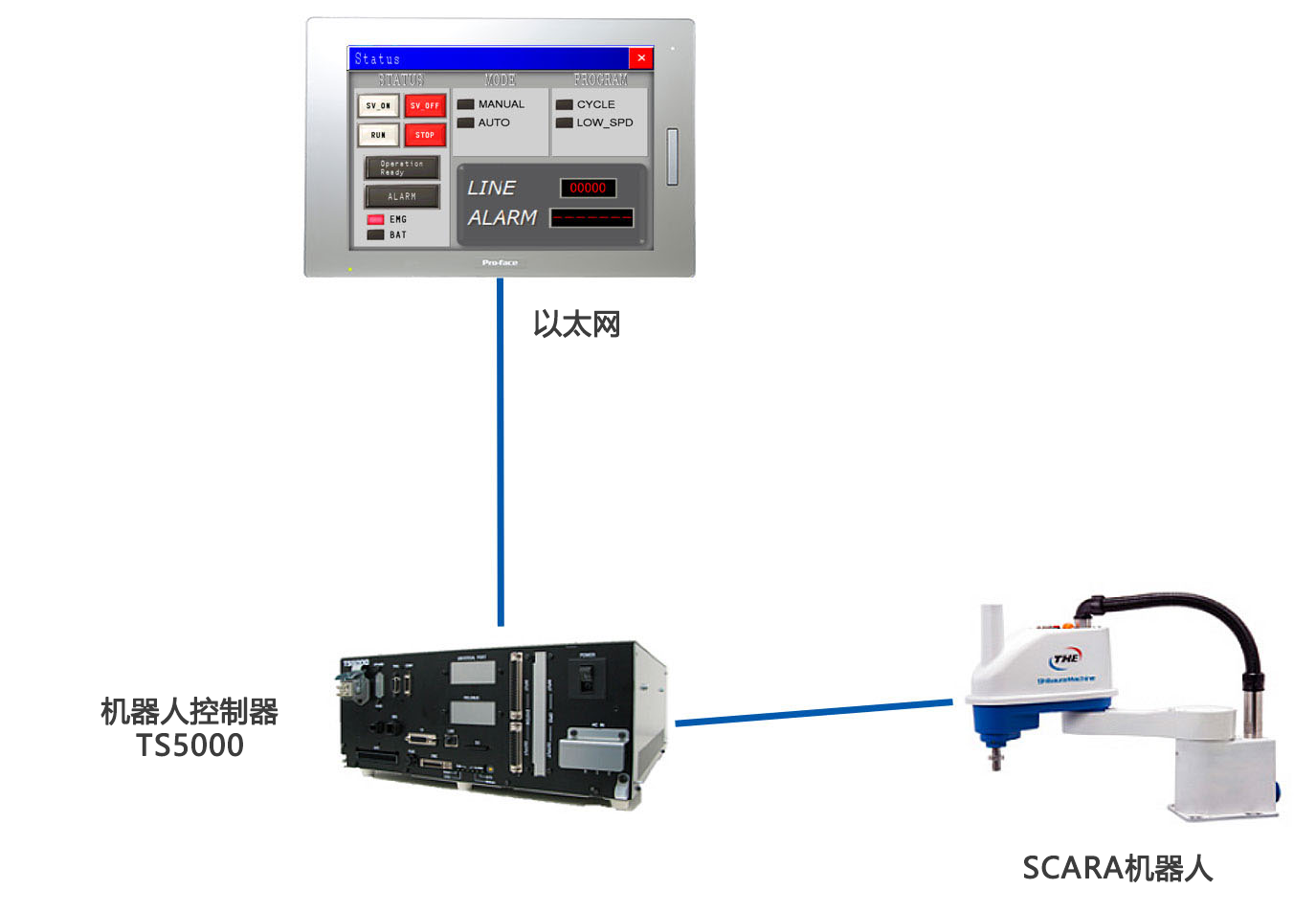
概述
Pro-face人机界面可直连芝浦机械的机器人控制器TS5000,轻松实现各种功能。