세부 사항
지원되는 연결 장치
| 제조사 | 제품명 | 시리즈 | 비고 |
|---|---|---|---|
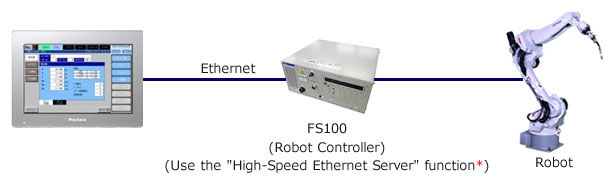
| 야스카와 전기 | 로봇 컨트롤러 | - | FS100 |
또한 이 기능과 함께 사용할 수 없는 옵션 기능이 있으므로 사용하려면 야스카와 전기에 문의하십시오.
타겟 HMI
| 시리즈 | 리솔루션 | 시리즈 해결 샘플 프로젝트 파일의 표시 단위 유형*1 | 화면 편집기 |
|---|---|---|---|
| SP5000 시리즈 SP5000X 시리즈 | 640 x 480 dot(VGA) | 박스 모듈:SP-5B10 디스플레이 모듈:SP-5500TP | GP-Pro EX Ver. 4.03.000이상 |
| 800 x 480 dot(WVGA)*2 | 박스 모듈:SP-5B10 디스플레이 모듈:SP-5400WA | GP-Pro EX Ver. 4.05.000이상 | |
| GP4000 시리즈 | 640 x 480 dot(VGA) | GP-4501T(아날로그 터치 패널) | GP-Pro EX Ver.3.01.203이상 |
| 320 x 240 dot(QVGA) | GP-4301T |
*1다른 모델을 사용하는 경우 GP-Pro EX 프로젝트 파일에서 모델을 변경할 수 있습니다. 자세한 내용은 테크니컬 가이드를 참조하십시오.
*2WVGA (800 × 480 픽셀)의 경우 화면 오른쪽에 기능 버튼 영역이 있습니다. 매뉴얼의 "SP5000 와이드 모델 용 샘플 프로젝트 파일에 추가 된 기능"을 참조하십시오.
특징
- 로봇 컨트롤러 상태 (예 : 모드, 작동 상태)는 GP 유닛에서 확인할 수 있습니다.
- 최대 8 개의 컨트롤러를 연결할 수 있습니다.
- I / O 컨트롤러의 상태는 실시간으로 모니터링 할 수 있습니다.
- GP 유닛에서 로봇 팔의 움직임을 표시합니다.
- 로봇 팔의 현재 위치를 실시간으로 표시 할 수 있습니다.
- 현재 알람 및 알람 히스토리의 세부 사항은 GP 유닛에서 볼 수 있습니다.
- T변수 및 주소 값을 한 번에 표시 할 수 있으므로 모니터링이 쉬워집니다.
- 유지 보수 기능으로 예측 유지 보수 및 CMOS 백업 화면이 제공됩니다.
이 샘플 작업이 중단되지 않고 오류가 발생하지 않는다는 것을 보증하는 것은 아닙니다.
이용 약관 및 주의 사항
사이트의 이용약관에 대해 동의하신 후에 다운로드 서비스를 이용하여 주시기 바랍니다파일을 다운로드 하심과 동시에 이용 약관에 동의하시는 것으로 인식합니다
이용 약관
파일 다운로드

For SP-5500TP / VGA(640*480)
5.33 MB (5,590,478 바이트)
For SP-5400WA / WVGA(800*480)
7.16 MB (7,505,581 바이트)
For GP-4501T / VGA(640*480)
5.25 MB (5,501,896 바이트)
For GP-4301T / QVGA(320*240)
4.25 MB (4,455,988 바이트)
업데이트 내역
[Ver.1.00b] (2020/04/24)
테크니컬 가이드 업데이트 4.2. 대상 HMI 디바이스
[Ver.1.00a] (2015/04/28)
SP5000 시리즈 지원
[Ver.1.00.02] (2013/10/04)
실제 변수 모니터 화면 추가
[Ver.1.00] (2012/11/20)
New
요약
이 샘플 프로젝트 파일은 GP4000 시리즈 및 SP5000 시리즈를 야스카와 전기에서 제조 한 로봇 컨트롤러 FS100과 연결하기위한 것입니다. 로봇을 사용하는 경우보다 편리하게 사용할 수있는 기능을 제공합니다.